Một vật quay không cân bằng sẽ không thể quay hiệu quả và có khả năng bị rung. lực rung gây tiếng ồn khó chịu cho người vận hành máy và có thể vượt quá giới hạn thiết kế của từng bộ phận máy, làm giảm tuổi thọ của các bộ phận này. mất cân bằng có thể đặt toàn bộ hệ thống vào nguy cơ hỏng hóc nghiêm trọng, đặc biệt với những thiết bị tốc độ quay hoặc khối lượng của vật rất cao.
Do đó cân bằng sẽ cải thiện hiệu quả của bất kỳ máy nào phụ thuộc vào rotor để hoạt động. Nó cũng sẽ tăng tuổi thọ cho máy móc của bạn, giảm nguy cơ hỏng hóc nghiêm trọng của các bộ phận máy móc và bảo vệ nhân viên của bạn khỏi bị thương.
CÁC DẠNG MẤT CÂN BẰNG

MẤT CÂN BẰNG TĨNH
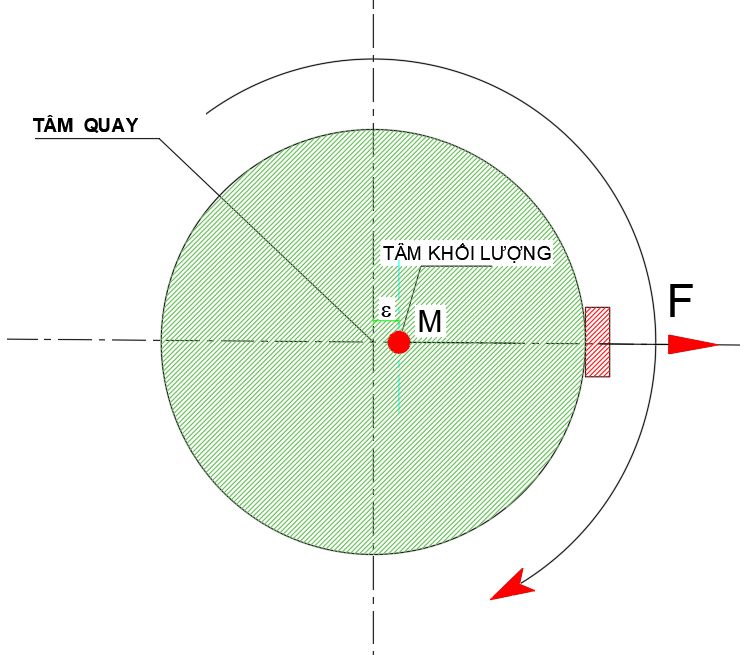
Với dạng này lực ly tâm F do khối lượng m gây ra sẽ kéo trục quán tính ra xa trục quay của rotor một khoảng luc này trục quán tính song song với trục quay
MẤT CÂN BẰNG NGẪU LỰC
Với dạng này lực ly tâm F1 do khối lượng m1 và lực ly tâm F2 do khối lượng m2, cặp lực này kéo đường tâm quán tính cắt với đường tâm quay nhưng đi qua trọng tâm
MẤT CÂN BẰNG ĐỘNG
Với dạng này lực ly tâm F1 do khối lượng m1 và lực ly tâm F2 do khối lượng m2, cặp lực này kéo đường tâm quán tính cắt với đường tâm quay ở vị trí bất kỳ
Mô phỏng các dạng mất cân bằng.
VẬY ROTOR KHÔNG CÂN BẰNG LÀ GÌ?
Sự mất cân bằng tồn tại trong Rotor khi tâm khối lượng khác với tâm quay của nó.
Các nguyên nhân gây mất cân bằng động
Trên thực tế, tất cả các bộ phận mới được gia công không đối xứng do các lỗ thổi trên vật đúc, số lượng và vị trí lỗ bu lông không đồng đều, các bộ phận được lắp lệch tâm, đường kính gia công lệch tâm với vị trí ổ trục, v.v.
Bởi vì các vòng bi hạn chế lực ly tâm do không cân bằng, làm cho rôto bị rung.
Rung động này gây mòn ổ trục, tạo ra tiếng ồn không cần thiết và trong các trường hợp nghiêm trọng có thể xảy ra hiện tượng phá hủy của Rotor
Do đó cần phải giảm sự mất cân bằng đến một giới hạn có thể chấp nhận được. như thế nào là chấp nhận được có phải càng thấp càng tốt đây là điều mong muốn nhưng đánh đổi điều này là chi phí về thời gian và tiền bạc nên để thoả mãn những lý do trên người ta đưa ra mức chấp nhận được và mức giới hạn này phải được xác định.
TIÊU CHUẨN MẤT CÂN BẰNG ĐỘNG
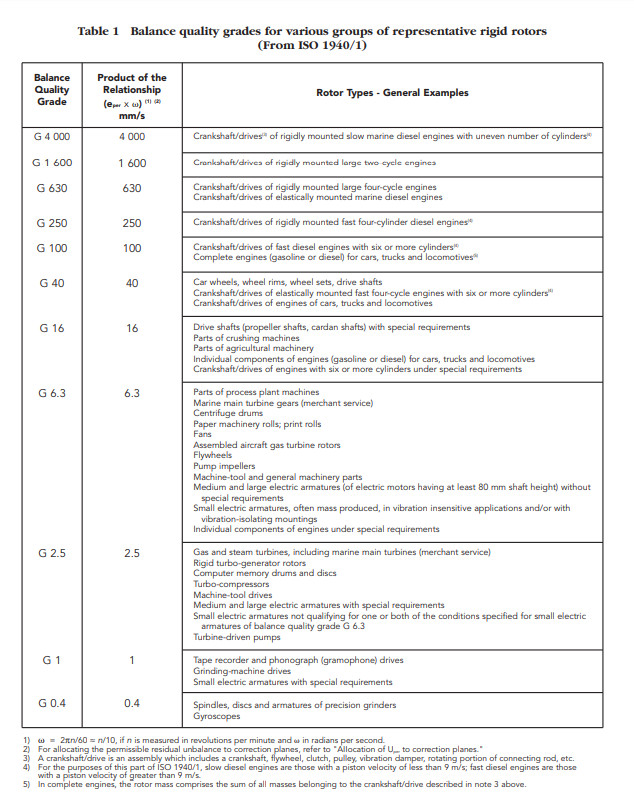
Tiêu chuẩn ISO 1940 tiêu chuẩn cân bằng vật quay cứng
Bảng sau cung cấp các cấp độ cân bằng theo ISO1940, áp dụng cho các loại vật quay thông dụng. Ta cũng có thể biểu diễn dưới dạng đồ thị lượng mất cân bằng còn lại cho phép (chuyển vị của khối tâm, đo bằng µm) theo vận tốc quay, áp dụng cho nhiều cấp độ về chất lượng cân bằng căn cứ theo Bảng sau:
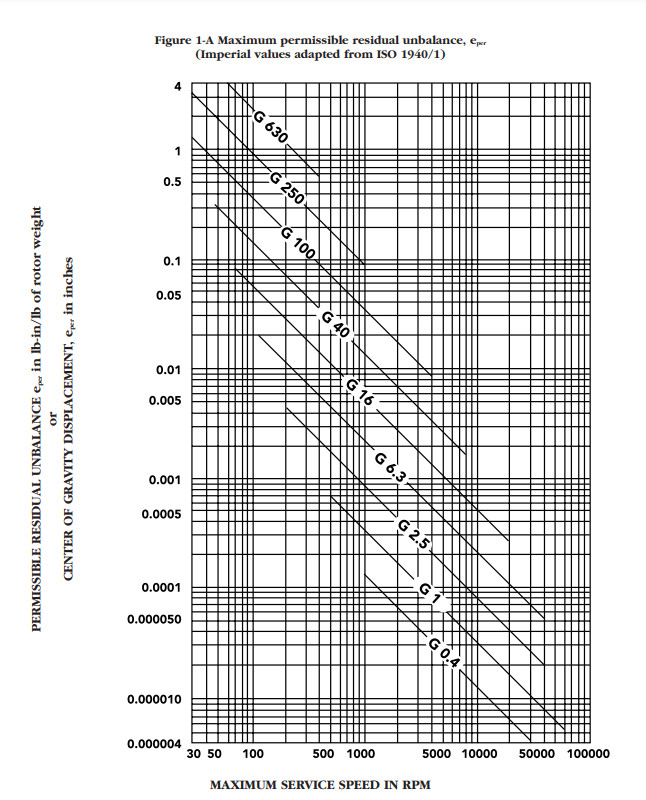
Dựa vào ISO 1940 standard để xác định lượng mất cân bằng còn lại cho phép cho từng tốc độ làm việc của Rotor cứng
LƯỢNG MẤT CÂN BẰNG
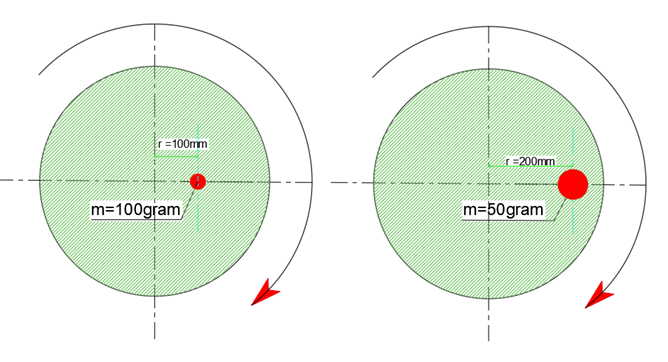
Rotor khối lượng M (kg) mất cân bằng một lượng m (g) nằm cách tâm một khoảng r (mm) khi quay lực ly tâm sẽ kéo trọng tâm C dịch xa tâm quay một khoảng e
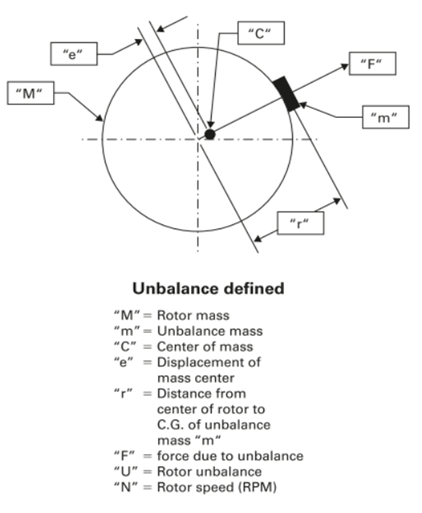
U :Lượng mất cân bằng
U= m*r = M*e
Đơn vị tính –hệ mét: gram.mm hay gram .cm đối với rotor lớn
– Hệ Imperial sẽ là gam-inch hoặc ounce-inch.
eper: Lượng mất cân bằng đơn vị
eper = U/M (gram*mm/Kg) = µm
đơn vị tính: gram*mm/Kg hay µm
NGUYÊN NHÂN GÂY MẤT CÂN BẰNG ĐỘNG
Lực gây mất cân bằng chính là lực ly tâm
Lực ly tâm được tính toán như sau:
F=mv2/r = mw2r
- F: Lực ly tâm
- m khối lượng vật
- v vận tốc hay tốc độ của vật: m/s
- r khoảng cách từ vật tới tâm quay
Với cùng lượng mất cân bằng đơn vị khối lượng được thêm vào hay bớt m đi phụ thuộc vào vị trí mà chúng ta gắn chúng